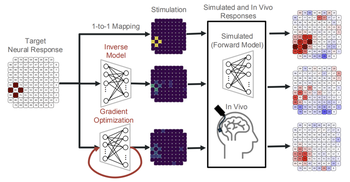
We developed a data-driven neural control framework for a visual cortical prosthesis in a blind human, showing that deep learning can synthesize efficient, stable stimulation patterns that reliably evoke percepts and outperform conventional calibration methods.
Topic: Machine Learning
Researchers Interested in This Topic
CE
Christian Grunt
Research Assistant
CS
Yuchen Hou
PhD Candidate
CS
Diego Linn
Research Assistant
CS
Jack T. Liu
Research Assistant
DYNS
Lucas Nadolskis
PhD Student
CS
Galen Pogoncheff
PhD Candidate
Research Projects
Deep learning-based control of electrically evoked activity in human visual cortex
Pehuén Moure, Jacob Granley, Fabrizio Grani, Leili Soo, Antonio Lozano, Rocio López-Peco, Adrián Villamarin-Ortiz, Cristina Soto-Sánchez, Shih-Chii Liu, Michael Beyeler, Eduardo Fernández bioRxiv
(Note: PM, JG, and FG are co-first authors. SL, MB, and EF are co-last authors.)
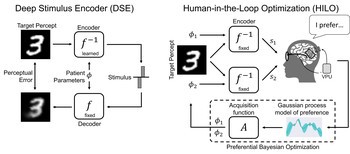
End-to-End Optimization of Bionic Vision
Rather than predicting perceptual distortions, one needs to solve the inverse problem: What is the best stimulus to generate a desired visual percept?
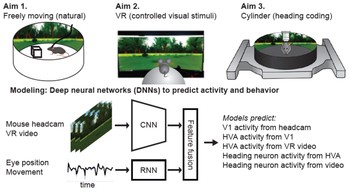
Cortical Visual Processing for Navigation
How does the brain extract relevant visual features from the rich, dynamic visual input that typifies active exploration, and how does the neural representation of these features support visual navigation?