We have developed CARLsim 4, a user-friendly SNN library written in C++ that can simulate large biologically detailed neural networks. Improving on the efficiency and scalability of earlier releases, the present release allows for the simulation using multiple GPUs and multiple CPU cores concurrently in a heterogeneous computing cluster. …
Topic: spiking neural networks
Research Projects
CARLsim 4: An open source library for large scale, biologically detailed spiking neural network simulation using heterogeneous clusters
Ting-Shou Chou, Hirak J. Kashyap, Jinwei Xing, Stanislav Listopad, Emily L. Rounds, Michael Beyeler, Nikil Dutt, Jeffrey L. Krichmar Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN)
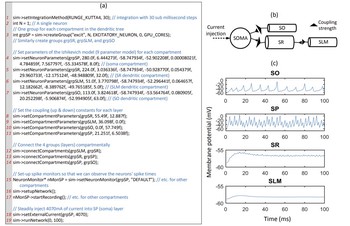
CARLsim 3: A user-friendly and highly optimized library for the creation of neurobiologically detailed spiking neural networks
We have developed CARLsim 3, a user-friendly, GPU-accelerated SNN library written in C/C++ that is capable of simulating biologically detailed neural models. The present release of CARLsim provides a number of improvements over our prior SNN library to allow the user to easily analyze simulation data, explore synaptic plasticity rules, and automate …
Michael Beyeler, Kristofor D. Carlson, Ting-Shou Chou, Nikil Dutt, Jeffrey L. Krichmar Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN)

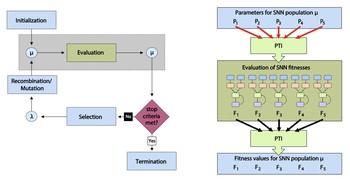
GPGPU accelerated simulation and parameter tuning for neuromorphic applications
We describe a simulation environment that can be used to design, construct, and run spiking neural networks (SNNs) quickly and efficiently using graphics processing units (GPUs). We then explain how the design of the simulation environment utilizes the parallel processing power of GPUs to simulate large-scale SNNs and describe recent modeling …
Kristofor D. Carlson, Michael Beyeler, Nikil Dutt, Jeffrey L. Krichmar Proceedings of the 2014 Asia and South Pacific Design Automation Conference (ASP-DAC)
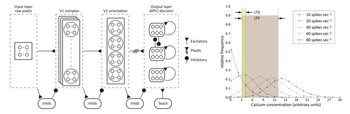
Categorization and decision-making in a neurobiologically plausible spiking network using a STDP-like plasticity rule
We present a large-scale model of a hierarchical spiking neural network (SNN) that integrates a low-level memory encoding mechanism with a higher-level decision process to perform a visual classification task in real-time. The model consists of Izhikevich neurons and conductance-based synapses for realistic approximation of neuronal dynamics, a …
Michael Beyeler, Nikil Dutt, Jeffrey L. Krichmar Neural Networks 48:109-124