Rather than aiming to one day restore natural vision, we might be better off thinking about how to create practical and useful artificial vision now.
Topic: computer vision
Research Projects
Assistive Technologies for People Who Are Blind
This research explores the integration of computer vision into various assistive devices, aiming to enhance urban navigation and environmental interaction for individuals who are blind or visually impaired.

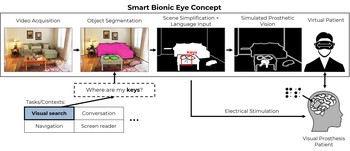
Event-Based Vision at the Edge
Neuromorphic event-based vision sensors may soon power low vision aids and retinal implants, where the visual scene has to be processed quickly and efficiently before it is displayed.

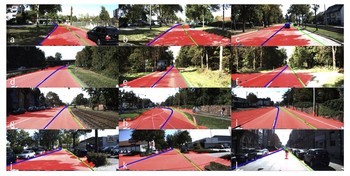
Vision-based robust road lane detection in urban environments
This paper presents an integrative approach to ego-lane detection that aims to be as simple as possible to enable real-time computation while being able to adapt to a variety of urban and rural traffic scenarios. The approach at hand combines and extends a road segmentation method in an illumination-invariant color image, lane markings detection …
Michael Beyeler, Florian Mirus, Alexander Verl Proceedings of the 2014 International Conference on Robotics and Automation (ICRA)