Navigating the last mile: Evaluating head- and cane-mounted cameras for egocentric spatial awareness
Abstract
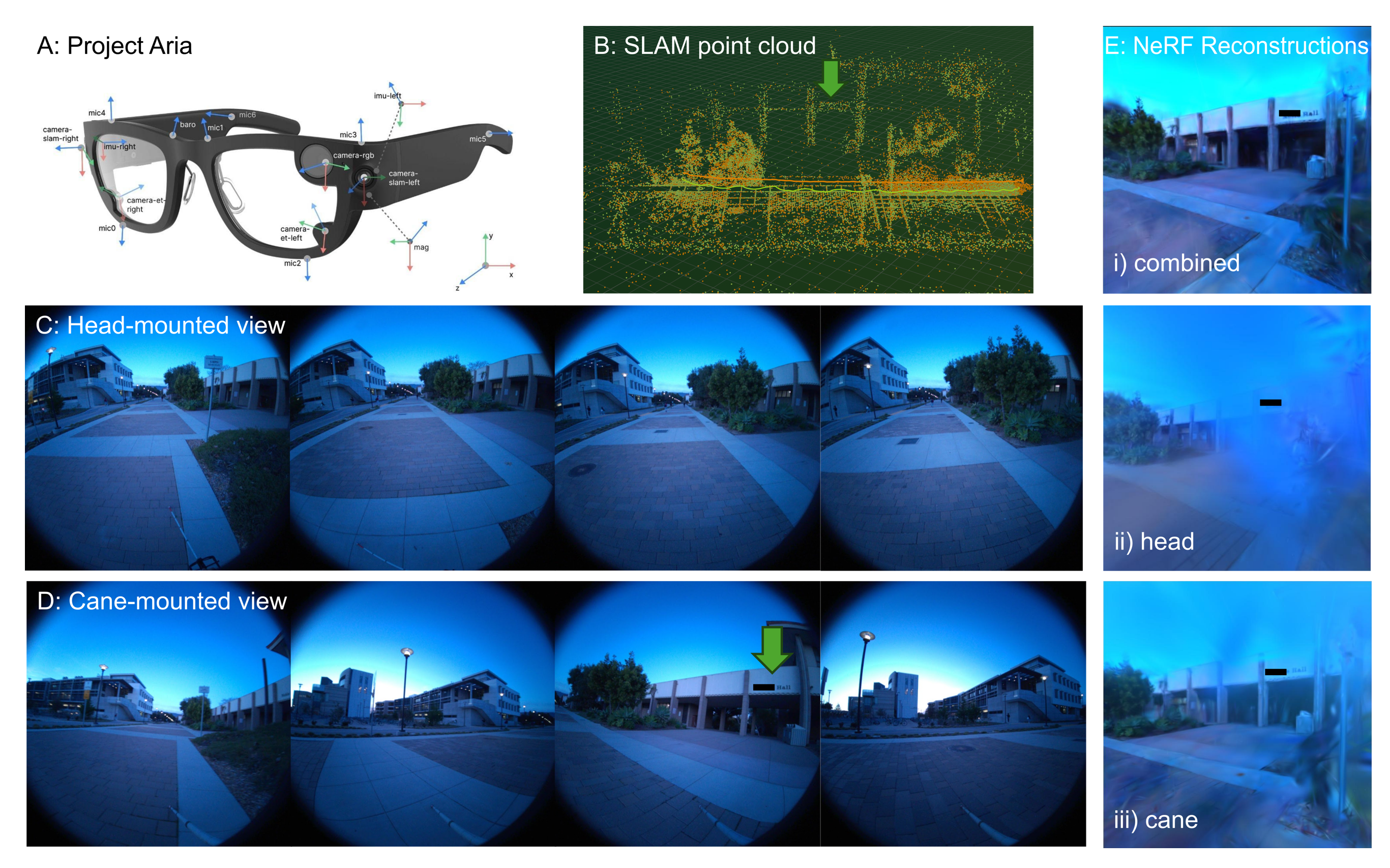
Robust navigational guidance is an important XR application for both sighted and non-sighted populations. In this paper, we mainly focus on blind pedestrians, who continue to face “last-mile” challenges such as locating entrances and navigating cluttered spaces. While smartglasses and wearables are maturing, a foundational design question remains underexplored: where on the body should cameras be placed to best support navigation? We present a mixed-methods investigation that focuses on the question of optimal sensor placement for generating spatial data supporting ego-centric navigation. A survey of 10 blind cane users surfaced practices for last-mile navigation and perceptions of body-mounted XR devices. A controlled case study with a blind co-author compared head- and cane-mounted cameras using synchronized Project Aria glasses while traversing five real-world environments. Using Simultaneous Localization and Mapping (SLAM) and Neural Radiance Fields (NeRFs) as diagnostic probes, we find that head-mounted cameras offer stability, cane-mounted cameras capture complementary ground-level detail, and fusing both yields increased robustness in scene reconstruction. We synthesize these findings into design guidance for hybrid XR systems that extend the cane without interfering with tactile and auditory cues.