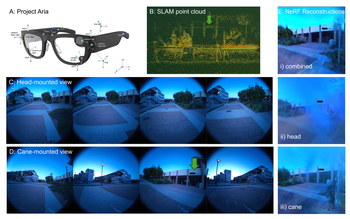
We evaluate head- and cane-mounted cameras for blind navigation and show that combining both yields superior spatial perception, guiding the design of hybrid, user-aligned assistive systems.
Assistive Technologies for People Who Are Blind
Globally, millions of individuals with visual impairments face significant challenges in navigation and independence. Traditional white canes, while helpful, offer limited assistance in complex environments. Accessible tech, once effective, often turns commercial with hefty prices. This hits harder due to the high unemployment rate among the visually impaired.
Our goal is to leverage computer vision and AI to co-design the next-generation of accessible technologies with people who are blind, focusing on affordable design and open-source software, thereby enabling community-driven development and widespread impact.

Project Lead:
PhD Student
Project Affiliates:
PhD Student
Principal Investigator:
Associate Professor
Collaborator:
Professor
Publications
Beyond physical reach: Comparing head- and cane-mounted cameras for last-mile navigation by blind users
Apurv Varshney, Lucas Nadolskis, Tobias Höllerer, Michael Beyeler arXiv:2504.19345