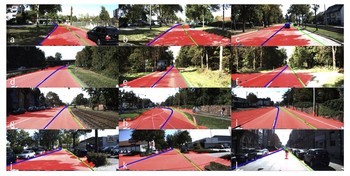
This paper presents an integrative approach to ego-lane detection that aims to be as simple as possible to enable real-time computation while being able to adapt to a variety of urban and rural traffic scenarios. The approach at hand combines and extends a road segmentation method in an illumination-invariant color image, lane markings detection …
Topic: driver information systems
Research Projects
Vision-based robust road lane detection in urban environments
Michael Beyeler, Florian Mirus, Alexander Verl Proceedings of the 2014 International Conference on Robotics and Automation (ICRA)